АННОТАЦИЯ
Настоящее пособие знакомит с основными условиями оптимальности и методами решения задач вариационного исчисления и оптимального управления. Будет полезно для подготовки и проведения практических занятий по разделу "Оптимальное управление", а также при выполнении домашних заданий по этой теме студентами.
Учебное пособие является электронной версией книги:
Оптимальное управление в примерах и задачах. Сотсков А.И., Колесник Г.В. - М.: Российская экономическая школа, 2002 - 58 с.
Предисловие
1. Простейшая задача вариационного исчисления.
Уравнение Эйлера
Примеры
Упражнения
2. Задача оптимального управления. Принцип максимума
Примеры
Упражнения
3. Фазовые ограничения в задаче оптимального управления
Примеры
Упражнения
4. Динамическое программирование и уравнение Беллмана
Примеры
Упражнения
Литература
Предисловие
Теория оптимального управления является одним из разделов курса "Математика для экономистов", читаемого в Российской экономической школе.
Опыт преподавания показывает, что данный раздел - один из наиболее сложных для освоения. Это прежде всего связано с концептуальными отличиями изучаемых в нем задач оптимального управления от задач конечномерной оптимизации, и, как следствие, с существенным усложнением используемых в них условий оптимальности.
В связи с этим представляется полезным дать наглядную иллюстрацию применения данных условий оптимальности к решению задач различных типов. Настоящее пособие и является попыткой дать такую иллюстрацию. В нем содержатся примеры и задачи по четырем темам:
. вариационному исчислению;
. принципу максимума в задачах без ограничений;
. принципу максимума при наличии фазовых ограничений;
. динамическому программированию.
Каждый раздел состоит из теоретической части, описывающей базовые понятия и результаты, используемые при решении соответствующих задач, примеров с решениями, а также задач для самостоятельной работы студентов.
Следует подчеркнуть, что данное пособие ни в коем случае не является теоретическим курсом, а ориентировано прежде всего на практическое применение методов оптимального управления. В качестве теоретического пособия по данному разделу можно порекомендовать, например, книгу.
По мнению авторов, данное пособие будет полезным преподавателям при подготовке и проведении практических занятий по разделу "Оптимальное управление", а также студентам при выполнении домашних заданий по этой теме.
Электронная версия книги : [Скачать, PDF, 633.8 КБ ].
Для просмотра книги в формате PDF требуется программа Adobe Acrobat Reader, новую версию которой можно бесплатно скачать с сайта компании Adobe.
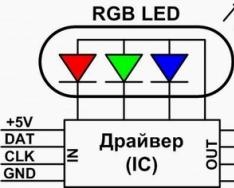
В общем случае автоматическая система состоит из объекта управления и совокупности устройств, которые обеспечивают управление этим объектом. Как правило, эта совокупность устройств включает в себя измерительные устройства, усилительные и преобразовательные устройства, а также исполнительные устройства. Если объединить эти устройство в одно звено (управляющее устройство), то структурная схема системы выглядит следующим образом:
В автоматической системе информация о
состоянии объекта управления через
измерительное устройство поступает на
вход управляющего устройства. Такие
системы называются системами с обратной
связью или замкнутыми системами.
Отсутствие этой информации в алгоритме
управления говорит о том, что система
разомкнута. Состояние объекта управления
в любой момент времени будем описывать
 переменными
переменными ,
которые называются координатами системы
или переменными состояния. Их удобно
считать координатами
,
которые называются координатами системы
или переменными состояния. Их удобно
считать координатами -
мерного вектора состояния.
-
мерного вектора состояния.
Измерительное устройство выдает
информацию о состоянии объекта. Если
на основании измерения вектора
 могут быть найдены значения всех
координат
могут быть найдены значения всех
координат вектора состояния
вектора состояния ,
то говорят, что система полностью
наблюдаема.
,
то говорят, что система полностью
наблюдаема.
Управляющее устройство вырабатывает
управляющее воздействие
 .
Таких управляющих воздействий может
быть несколько, они образуют
.
Таких управляющих воздействий может
быть несколько, они образуют -
мерный управляющий вектор.
-
мерный управляющий вектор.
На вход управляющего устройства поступает
задающее входное воздействие
 .
Это входное воздействие несет информацию
о том, какое должно быть состояние
объекта. На объект управления может
действовать возмущающее воздействие
.
Это входное воздействие несет информацию
о том, какое должно быть состояние
объекта. На объект управления может
действовать возмущающее воздействие ,
которое представляет собой нагрузку
или помеху. Измерение координаты объекта,
как правило, осуществляется с некоторыми
погрешностями
,
которое представляет собой нагрузку
или помеху. Измерение координаты объекта,
как правило, осуществляется с некоторыми
погрешностями ,
которые тоже носят случайный характер.
,
которые тоже носят случайный характер.
Задачей управляющего устройства является
выработка такого управляющего воздействия
 ,
чтобы качество функционирования
автоматической системы в целом было бы
наилучшим в некотором смысле.
,
чтобы качество функционирования
автоматической системы в целом было бы
наилучшим в некотором смысле.
Мы будем рассматривать такие объекты управления, которые являются управляемыми. То есть вектор состояния можно изменять требуемым образом путем соответствующего изменения вектора управления. Будем подразумевать, что объект полностью наблюдаемый.
Так, например, положение летательного
аппарата характеризуется шестью
координатами состояния. Это
 -
координаты центра масс,
-
координаты центра масс, -
углы Эйлера, определяющие ориентацию
летательного аппарата относительно
центра масс. Положение летательного
аппарата можно изменить с помощью рулей
высоты, курса, элерона и с помощью
уклонения вектора силы тяги. Таким
образом управляющий вектор определен
следующим образом:
-
углы Эйлера, определяющие ориентацию
летательного аппарата относительно
центра масс. Положение летательного
аппарата можно изменить с помощью рулей
высоты, курса, элерона и с помощью
уклонения вектора силы тяги. Таким
образом управляющий вектор определен
следующим образом:
 -
угол отклонения рулей высоты
-
угол отклонения рулей высоты
 -
курс
-
курс
 -
элерон
-
элерон
 - тяга
- тяга
Вектор состояния
 в
этом случае определяется следующим
образом:
в
этом случае определяется следующим
образом:
Можно поставить задачу выбора управления,
с помощью которого летательный аппарат
переводится из заданного начального
состояния
 в заданное конечное состояние
в заданное конечное состояние с минимальными затратами топлива или
за минимальное время.
с минимальными затратами топлива или
за минимальное время.
Дополнительная сложность при решении технических задач возникает в силу того, что на управляющее воздействие и на координаты состояния объекта управления, как правило, накладываются различные ограничения.
На любой угол рулей высоты, курса, элерона существуют ограничения:



 - тяга сама по себе ограничена.
- тяга сама по себе ограничена.
На координаты состояния объекта управления и их производные также накладываются ограничения, которые связаны с допустимыми перегрузками.
Мы будем рассматривать объекты управления, которые описываются дифференциальным уравнением:

 (1)
(1)
Или в векторном виде:

 -
- -мерный
вектор состояния объекта
-мерный
вектор состояния объекта
 -
- -мерный
вектор управляющих воздействий
-мерный
вектор управляющих воздействий
 -
функция правой части уравнения (1)
-
функция правой части уравнения (1)
На вектор управления
 накладывается ограничение, мы будем
полагать, что его значения принадлежат
некоторой замкнутой области
накладывается ограничение, мы будем
полагать, что его значения принадлежат
некоторой замкнутой области некоторого
некоторого -мерного
пространства. Это означает, что управляющая
функция
-мерного
пространства. Это означает, что управляющая
функция в любой момент времени принадлежит
области
в любой момент времени принадлежит
области (
( ).
).
Так, например, если координаты управляющей функции удовлетворяет неравенствам:


то область
 является
является -мерным
кубом.
-мерным
кубом.
Назовем допустимым управлением всякую
кусочно-непрерывную функцию
 ,
значения которой в каждый момент времени
,
значения которой в каждый момент времени принадлежит области
принадлежит области ,
и которая может иметь разрывы первого
рода. Оказывается, даже в некоторых
задачах оптимального управления решение
может быть получено в классе
кусочно-непрерывного управления. Для
того, чтобы выбрать управление
,
и которая может иметь разрывы первого
рода. Оказывается, даже в некоторых
задачах оптимального управления решение
может быть получено в классе
кусочно-непрерывного управления. Для
того, чтобы выбрать управление как
функцию времени и начального состояния
системы
как
функцию времени и начального состояния
системы ,
которое однозначно определяет движение
объекта управления, требуется, чтобы
система уравнений (1) удовлетворяла
условиям теоремы существования и
единственности решения в области
,
которое однозначно определяет движение
объекта управления, требуется, чтобы
система уравнений (1) удовлетворяла
условиям теоремы существования и
единственности решения в области .
В этой области располагаются возможные
траектории движения объекта и возможные
управляющие функции
.
В этой области располагаются возможные
траектории движения объекта и возможные
управляющие функции .
Если область изменения переменных
является выпуклой, то для существования
и единственности решения достаточно,
чтобы функции
.
Если область изменения переменных
является выпуклой, то для существования
и единственности решения достаточно,
чтобы функции
 .
были непрерывны по всем аргументам и
имели непрерывные частные производные
по переменным
.
были непрерывны по всем аргументам и
имели непрерывные частные производные
по переменным
 .
.
В качестве критерия, который характеризует качество работы системы, выбирается функционал вида:
 (2)
(2)
В качестве функции
 будем
предполагать, что она непрерывна по
всем своим аргументам и имеет непрерывные
частные производные по
будем
предполагать, что она непрерывна по
всем своим аргументам и имеет непрерывные
частные производные по
 .
.
Оптимальные САУ это системы в которых управление осуществляется таким образом что требуемый критерий оптимальности имеет экстремальное значение. Граничные условия определяющие начальное и требуемое конечное состояния системы технологическая цель системы. tн Её ставят в тех случаях когда особый интерес представляет среднее отклонение в течение определённого интервала времени и задача системы управления обеспечить минимум этого интеграла...
Поделитесь работой в социальных сетях
Если эта работа Вам не подошла внизу страницы есть список похожих работ. Так же Вы можете воспользоваться кнопкой поиск
Оптимальное управление
Воронов А.А., Титов В.К., Новогранов Б.Н. Основы теории автоматического регулирования и управления. М.: Высшая школа, 1977. 519с. С. 477 491.
Оптимальные САУ это системы, в которых управление осуществляется таким образом, что требуемый критерий оптимальности имеет экстремальное значение.
Примеры оптимального управления объектами:
- Управление движением ракеты с целью достижения ею заданной высоты или дальности при минимальном расходе горючего;
- Управление перемещением приводимого двигателем механизма, при котором минимизировались бы затраты энергии;
- Управление атомным реактором, при котором максимальна производительность.
Задача оптимального управления формулируется следующим образом:
“Найти такой закон изменения во времени управления u (t ), при котором система при заданных ограничениях перейдёт из одного заданного состояния в другое оптимальным образом в том смысле,что функционал I , выражающий качество процесса, получит при найденном управлении экстремальное значение “.
Чтобы решить задачу оптимального управления, необходимо знать:
1.Математическое описание объекта и среды, связывающее значения всех координат исследуемого процесса,управляющих и возмущающих воздействий;
2.Ограничения физического характера на координаты и закон управления, выраженные математически;
3. Граничные условия, определяющие начальное и требуемое конечное состояния системы
(технологическая цель системы);
4.Целевую функцию (функционал качества
математическая цель).
Математически критерий оптимальности чаще всего представляют в виде:
t к
I =∫ f o [ y (t ), u (t ), f (t ), t ] dt + φ [ y (t к ), t к ], (1)
t н
где первое слагаемое характеризует качество управления на всём интервале (t н , t н ) и называется
интегральной составляющей, второе слагаемое
характеризует точность в конечный (терминальный) момент времени t к .
Выражение (1) называется функционалом, так как I зависит от выбора функции u (t ) и получающегося при этом y (t ).
Задача Лагранжа. В ней минимизируется функционал
t к
I=∫f o dt.
t н
Её ставят в тех случаях, когда особый интерес представляет среднее отклонение в течение
определённого интервала времени, и задача системы управления обеспечить минимум этого интеграла (ухудшение качества продукции, убыток и т.п.).
Примеры функционалов:
I =∫ (t ) dt критерий минимальной ошибки в установившемся режиме, где x (t )
- отклонение управляемого параметра от заданного значения;
I =∫ dt = t 2 - t 1 = > min критерий максимального быстродействия САУ;
I =∫ dt = > min критерий оптимальной экономичности.
Задача Майера. В этом случае минимизируемым является функционал, определяемый только терминальной частью, т.е.
I = φ =>min.
Например, для системы управления ЛА, описываемым уравнением
F o (x , u , t ),
можно поставить следующую задачу: определить управление u (t ), t н ≤ t ≤ t к так, чтобы за
заданное время полёта достичь максимальной дальности при условии, что в конечный момент времени t к ЛА совершит посадку, т.е. x (t к ) =0.
Задача Больца сводится к задаче минимизации критерия (1).
Базовыми методами решения задач оптимального управления являются:
1.Классическое вариационное исчисление теорема и уравнение Эйлера;
2.Принцип максимума Л.С. Понтрягина;
3.Динамическое программирование Р. Беллмана.
УРАВНЕНИЕ И ТЕОРЕМА ЭЙЛЕРА
Пусть задан функционал:
t к
I =∫ f o dt ,
t н
где некоторые дважды дифференцируемые функции, среди которых необходимо найти такие функции (t ) или экстремали , которые удовлетворяют заданным граничным условиям x i (t н ), x i (t к ) и минимизируют функционал.
Экстремали отыскиваются среди решений уравнения Эйлера
I = .
Для установления факта минимизации функционала необходимо удостовериться, что вдоль экстремалей выполняются условия Лагранжа:
аналогичные требованиям положительности второй производной в точке минимума функции.
Теорема Эйлера: “Если экстремум функционала I существует и достигается среди гладких кривых, то он может достигаться только на экстремалях”.
ПРИНЦИП МАКСИМУМА Л.С.ПОНТРЯГИНА
Школа Л.С.Понтрягина сформулировала теорему о необходимом условии оптимальности, сущность которой в следующем.
Допустим, что дифференциальное уравнение объекта вместе с неизменяемой частью управляющего устройства заданы в общей форме:
На управление u j могут накладываться ограничения, например, в виде неравенств:
, .
Цель управления состоит в переводе объекта из начального состояния (t н ) в конечное состояние (t к ). Момент окончания процесса t к может быть фиксированным или свободным.
Критерием оптимальности пусть будет минимум функционала
I = dt .
Введём вспомогательные переменные и образуем функцию
Fo ()+ f () f ()+
Принцип максимума гласит, что для оптимальности системы, т.е. для получения минимума функционала, необходимо существование таких ненулевых непрерывных функций, удовлетворяющих уравнению
Что при любом t , находящемся в заданном диапазоне t н≤ t ≤ t к , величина Н, как функция допустимого управления, достигает максимума.
Максимум функции Н определяется из условий:
если не достигает границ области, и как точная верхняя грань функции Н по в противном случае.
Динамическое программирование Р.Беллмана
Принцип оптимальности Р.Беллмана:
“ Оптимальное поведение обладает тем свойством, что, каковы бы ни были первоначальное состояние и решение в начальный момент, последующие решения должны составлять оптимальное поведение относительно состояния, получающегося в результате первого решения.”
Под “поведением” системы следует понимать движение этих систем, а термин “решение” относится к выбору закона изменения во времени управляющих сил.
В динамическом программировании процесс поиска экстремалей разбивается на n шагов, в то время как в классическом вариационном исчислении ведётся поиск экстремали целиком.
Процесс поиска экстремали базируется на следующих предпосылках принципа оптимальности Р.Беллмана:
- Каждый отрезок оптимальной траектории является сам по себе оптимальной траекторией;
- Оптимальный процесс на каждом участке не зависит от его предыстории;
- Оптимальное управление (оптимальная траектория) ищется с помощью попятного движения [от y (T ) к y (T -∆) , где ∆ = Т/ N , N число участков разбиения траектории, и т.д.].
Эвристически уравнения Беллмана для требуемых постановок задач выведены применительно к непрерывным и дискретным системам.
Адаптивное управление
Андриевский Б.Р., Фрадков А.Л. Избранные главы теории автоматического управления с примерами на языке MATLAB . СПб.: Наука, 1999. 467с. Глава 12.
Воронов А.А., Титов В.К., Новогранов Б.Н. Основы теории автоматического регулирования и управления. М.: Высшая школа, 1977. 519с. С. 491 499.
Анхимюк В.Л., Опейко О.Ф., Михеев Н.Н. Теория автоматического управления. Мн.: Дизайн ПРО, 2000. 352с. С. 328 340.
Необходимость в адаптивных системах управления возникает в связи со значительным усложнением решаемых задач управления, причем специфическая особенность такого усложнения заключается в отсутствии практической возможности для подробного изучения и описания процессов, протекающих в управляемом объекте.
Например, современные высокоскоростные летательные аппараты, точные априорные данные о характеристиках которых во всех условиях функционирования не могут быть получены из-за значительных разбросов параметров атмосферы, больших диапазонов изменения скоростей полета, дальностей и высот, а также из-за наличия широкого спектра параметрических и внешних возмущений.
Некоторые объекты управления (самолеты и ракеты, технологические процессы и энергетические установки) отличаются тем, что их статические и динамические характеристики изменяются в широких пределах непредвиденным заранее образом. Оптимальное управление такими объектами возможно с помощью систем, в которых недостающая информация автоматически пополняется самой системой в процессе работы.
Адаптивными (лат.” adaptio ” приспособление) называются такие системы, которые при изменении параметров объектов или характеристик внешних воздействий в процессе эксплуатации самостоятельно, без участия человека изменяют параметры регулятора, его структуру, настройку или регулирующие воздействия для поддержания оптимального режима работы объекта.
Создание адаптивных систем управления осуществляется в принципиально иных условиях, т.е. адаптивные методы должны способствовать достижению высокого качества управления при отсутствии достаточной полноты априорной информации о характеристиках управляемого процесса или в условиях неопределенности.
Классификация адаптивных систем :
Самоприспосабливающиеся
(адаптивные)
Системы управления
Самонастраивающиеся Самообучающиеся Системы с адаптацией
Системы системы в особых фазовых
Состояниях
Поисковые Беспоиско- Обучающие- Обучающие- Релейные Адаптивные
(экстремаль- вые (анали- ся с поощре- ся без автоколеба- системы с
Ные) тические) нием поощрения тельные переменной
Системы системы системы структурой
Структурная схема классификации АС (по характеру процесса адаптации)
Самонастраивающиеся системы (СНС) представляют собой системы, в которых адаптация при изменении условий работы осуществляется путем изменения параметров и управляющих воздействий.
Самоорганизующимися называются системы, в которых адаптация осуществляется за счет изменения не только параметров и управляющих воздействий, но и структуры.
Самообучающаяся это система автоматического управления, в которой оптимальный режим работы управляемого объекта определяется с помощью управляющего устройства, алгоритм которого автоматически целенаправленно совершенствуется в процессе обучения путем автоматического поиска. Поиск производится с помощью второго управляющего устройства, являющегося органической частью самообучающейся системы.
В поисковых системах изменение параметров управляющего устройства или управляющего воздействия осуществляется в результате поиска условий экстремума показателей качества. Поиск условий экстремума в системах этого типа осуществляется с помощью пробных воздействий и оценки полученных результатов.
В беспоисковых системах определение параметров управляющего устройства или управляющих воздействий производится на основе аналитического определения условий, обеспечивающих заданное качество управления без применения специальных поисковых сигналов.
Системы с адаптацией в особых фазовых состояниях используют особые режимы или свойства нелинейных систем (режимы автоколебаний, скользящие режимы) для организации контролируемых изменений динамических свойств системы управления. Специально организованные особые режимы в таких системах либо служат дополнительным источником рабочей информации об изменяющихся условиях функционирования системы, либо наделяют системы управления новыми свойствами, за счет которых динамические характеристики управляемого процесса поддерживаются в желаемых пределах независимо от характера возникающих при функционировании изменений.
При применении адаптивных систем решаются следующие основные задачи:
1 . В процессе функционирования системы управления при изменении параметров, структуры и внешних воздействий обеспечивают такое управление, при котором сохраняются заданные динамические и статические свойства системы;
2 . В процессе проектирования и наладки при начальном отсутствии полной информации о параметрах, структуре объекта управления и внешних воздействиях производят автоматическую настройку системы в соответствии с заданными динамическими и статическими свойствами.
Пример 1 . Адаптивная система стабилизации углового положения ЛА.
f 1 (t ) f 2 (t ) f 3 (t )
Д1 Д2 Д3
ВУ1 ВУ2 ВУ3 f (t ) f 1 (t ) f 2 (t ) f 3 (t )
u (t ) W 1 (p ) W 0 (p ) y (t )
+ -
Рис. 1.
Приспосабливающаяся система стабилизации ЛА
При изменении условий полета меняется передаточная функция W 0 (p ) ЛА, а, следовательно, и динамическая характеристика всей системы стабилизации:
. (1)
Возмущения со стороны внешней среды f 1 (t ), f 2 (t ), f 3 (t ) , приводящие к контролируемым изменениям параметров системы, приложены к различным точкам объекта.
Возмущающее воздействие f (t ) , приложенное непосредственно к входу объекта управления, в отличие от f 1 (t ), f 2 (t ), f 3 (t ) не меняет его параметров. Поэтому в процессе работы системы измеряют только f 1 (t ), f 2 (t ), f 3 (t ).
В соответствии с принципом обратной связи и выражением (1) неконтролируемые изменения характеристики W 0 (p ) из-за возмущений и помех вызывают сравнительно небольшие изменения параметров Ф(p ) .
Если поставить задачу более полной компенсации контролируемых изменений, чтобы передаточная функция Ф(р) системы стабилизации ЛА оставалась практически неизменной, то следует надлежащим образом изменить характеристику регулятора W 1 (p ). Это и осуществляется в приспосабливающейся САУ, выполненной по схеме рис.1. Параметры внешней среды, характеризуемые сигналами f 1 (t ), f 2 (t ), f 3 (t ), например давление скоростного напора P H (t ) , температура окружающего воздуха T 0 (t ) и скорость полёта υ(t ) , непрерывно измеряются датчиками Д 1 , Д 2 , Д 3 , и текущие значения параметров поступают в вычислительные устройства В 1, В 2 ,В 3 , вырабатывающие сигналы, с помощью которых подстраивается характеристика W 1 (p ), чтобы компенсировать изменения характеристики W 0 (p ).
Однако, в АСАУ данного типа (с разомкнутым циклом настройки) отсутствует самоанализ эффективности осуществляемых ею контролируемых изменений.
Пример 2. Экстремальная система управления скоростью полета ЛА.
Z Возмущающее
Воздействие
X 3 = X 0 - X 2
Устройство авто- X 0 Усилительно- X 4 Исполнительное X 5 Регулируемый X 1
Матического по- преобразователь- устройство объект
Иска экстремума + - ное устройство
Измерительное
Устройство
Рис.2.Функциональная схема экстремальной системы управления скоростью полета ЛА
Экстремальная система определяет наивыгоднейшую программу, т.е. то значение X 1 (требуемая скорость движения ЛА), которое нужно в данный момент выдерживать, чтобы производился минимум расхода горючего на единицу длины пути.
Z - характеристика объекта; X 0 - управляющее воздействие на систему.
(величина расхода горючего)
y(0)
y(T)
Самоорганизующиеся системы
В этих нормах отдельно нормируется каждый компонент микроклимата в рабочей зоне производственного помещения: температура относительная влажность скорость движения воздуха в зависимости от способности организма человека к акклиматизации в разное время года характера одежды интенсивности производимой работы и характера тепловыделений в рабочем помещении. Перепады температуры воздуха по высоте и по горизонтали а также изменения температуры воздуха в течение смены при обеспечении оптимальных величин микроклимата на рабочих местах не должны... Управление: понятие признаки система и принципы Органы государственного управления: понятие виды и функции. По содержанию административное право является государственно-управленческим правом реализующим правовой интерес большинства граждан для чего субъекты управления наделяются юридически властными полномочиями представительскими функциями государства. Следовательно объектом действия юридических норм являются специфические управленческие общественные отношения возникающие между субъектом управления управляющим и объектами... Государственное регулирование социально-экономического развития регионов. Местные бюджеты как финансовая основа социально-экономического развития региона. Разные территории Украины имеют свои особенности и отличия как относительно экономического развития так и в социальном историческом языковом и ментальном аспектах. Из таких проблем нужно прежде всего назвать несовершенство отраслевой структуры большинства региональных хозяйственных комплексов их низкую экономическую эффективность; значительные отличия между регионами в уровнях...Для проектирования оптимальной САУ необходима полная информация об ОУ, возмущающих и задающих воздействиях, начальном и конечном состояниях ОУ. Далее требуется выбрать критерий оптимальности. В качестве такого критерия можно использовать один из показателей качества системы. Однако требования к отдельным показателям качества, как правило, противоречивы (например, повышение точности системы достигается уменьшением запаса устойчивости). Кроме того, оптимальная система должна иметь минимально возможную ошибку не только при отработке какого-то конкретного управляющего воздействия, но в течение всего времени работы системы. Следует также учитывать, что решение задачи оптимального управления зависит не только от структуры системы, но и от параметров составляющих ее элементов.
Достижение оптимального функционирования САУ во многом определяется тем, как осуществляется управление во времени, какова программа, или алгоритм управления. В связи с этим для оценки оптимальности систем используют интегральные критерии, вычисляемые как сумма значений интересующего проектировщиков параметра качества системы за все время процесса управления.
В зависимости от принятого критерия оптимальности рассматривают следующие виды оптимальных систем.
1. Системы , оптимальные по быстродействию , которые обеспечивают минимальное время перевода ОУ из одного состояния в другое. В этом случае критерий оптимальности выглядит следующим образом:
где / н и / к - моменты начала и окончания процесса управления.
В таких системах длительность процесса управления минимальна. Простейший пример - система управления двигателем, обеспечивающая минимальное время разгона его до заданной частоты вращения с учетом всех имеющихся ограничений.
2. Системы , оптимальные по расходу ресурсов , которые гарантируют минимум критерия

где к - коэффициент пропорциональности; U(t) - управляющее воздействие.
Такая система управления двигателем обеспечивает, например, минимальный расход топлива за все время управления.
3. Системы , оптимальные по потерям управления (или по точности), которые обеспечивают минимальные ошибки управления на основании критерия где e(f) - динамическая ошибка.

В принципе задача проектирования оптимальной САУ может быть решена простейшим методом перебора всех возможных вариантов. Конечно, такой метод требует больших затрат времени, но современные ЭВМ позволяют в некоторых случаях им воспользоваться. Для решения задач оптимизации разработаны специальные методы вариационного исчисления (метод максимума, метод динамического программирования и др.), позволяющие учесть все ограничения реальных систем.
В качестве примера рассмотрим, каким должно быть оптимальное по быстродействию управление электродвигателем постоянного тока, если подаваемое на него напряжение ограничено предельной величиной {/ лр, а сам двигатель можно представить в виде апериодического звена 2-го порядка (рис. 13.9, а).
Метод максимума позволяет рассчитать закон изменения и(г), обеспечивающий минимальное время разгона двигателя до частоты вращения (рис. 13.9, б). Процесс управления данным двигателем должен состоять из двух интервалов, в каждом из которых напряжение u(t) принимает свое предельное допустимое значение (в интервале 0 - /,: u(t) = +?/ пр, в интервале /| - / 2: u(t) = -?/ пр)* Для обеспечения такого управления в состав системы должен быть включен релейный элемент.
Как и обычные системы, оптимальные системы бывают разомкнутыми, замкнутыми и комбинированными. Если оптимальное управление, переводящее ОУ из начального состояния в конечное и не зависящее или слабо зависящее от возмущающих воздействий, может быть задано как функция времени U = (/(/), то строится разомкнутая система программного управления (рис. 13.10, а).
В программное устройство ПУ закладывается оптимальная программа П, рассчитанная на достижение экстремума принятого критерия оптимальности. По такой схеме осуществляется управ-

Рис. 13.9.
а - с обшим управляющим устройством; б - с двухуровневым управляющим
устройством
Рис. 13.10. Схемы оптимальных систем: а - разомкнутой; б - комбинированной
ление станками с числовым программным управлением и простейшими роботами, производится вывод ракет на орбиту и т.д.
Наиболее совершенными, хотя и наиболее сложными, являются комбинированные оптимальные системы (рис. 13.10, б). В таких системах разомкнутый контур осуществляет оптимальное управление по заданной программе, а замкнутый контур, оптимизированный по минимуму ошибки, отрабатывает отклонение выходных параметров. Используя канат измерения возмущений /*, система становится инвариантной относительно всего множества задающих и возмущающих воздействий.
Для того чтобы реализовать столь совершенную систему управления, необходимо точно и быстро измерять все возмущаюшие воздействия. Однако такая возможность имеется далеко не всегда. Гораздо чаще о возмущающих воздействиях известны только усредненные статистические данные. Во многих случаях, особенно в системах телеуправления, даже задающее воздействие поступает в систему вместе с помехами. А так как помеха представляет собой в общем случае случайный процесс, то удается синтезировать только статистически оптимальную систему. Такая система не будет оптимальной для каждой конкретной реализации процесса управления, но она будет в среднем наилучшей для всего множества его реализаций.
Для статистически оптимальных систем в качестве критериев оптимальности используют усредненные вероятностные оценки. Например, для следящей системы, оптимизированной по минимуму ошибки, в качестве статистического критерия оптимальности используют математическое ожидание квадрата отклонения выходного воздействия от заданного значения, т.е. дисперсию:
Используются и другие вероятностные критерии. Например, в системе обнаружения целей, где важно только наличие или отсутствие цели, в качестве критерия оптимальности применяют вероятность ошибочного решения Р ош:
где Р п ц - вероятность пропуска цели; Р ЛО - вероятность ложного обнаружения.
Во многих случаях рассчитанные оптимальные САУ оказываются практически не реализуемыми ввиду их сложности. Как правило, требуется получение точных значений производных высоких порядков от входных воздействий, что технически очень трудно осуществимо. Зачастую даже теоретический точный синтез оптимальной системы оказывается невозможен. Однако методы оптимального проектирования позволяют строить квазиоптимальные системы, хотя и упрощенные в той или иной степени, но все- гаки позволяющие достичь значений принятых критериев оптимальности, близких к экстремальным.
Оптимальное управление в последние годы начали применять как в технических системах для повышения эффективности производственных процессов, так и в системах организационного управления для совершенствования деятельности предприятий, организаций, отраслей народного хозяйства.
В организационных системах обычно интересуются конечным, установившимся результатом команды, не исследуя
эффективность во время переходного процесса между отдачей команды и получением окончательного результата Объясняется это тем, что обычно в таких системах потери в переходном процессе достаточно малы и влияют несущественно на общую величину выигрыша в установившемся режиме, поскольку сам установившийся режим значительно более длителен, чем переходный процесс. Но иногда динамика не исследуется из-за математических трудностей. Методам оптимизации конечных состояний в организационных и экономических системах посвящены курсы методов. оптимизации и исследования операций.
В управлении динамическими техническими системами оптимизация часто существенна именно для переходных процессов, в которых показатель эффективности зависит не только от текущих значений координат (как в экстремальном управлении), но и от характера изменения в прошлом, настоящем и будущем, и выражается некоторым функционалом от координат, их производных и, может быть, времени.
В качестве примера можно привести управление бегом спортсмена на дистанции. Так как его запас энергии ограничен физиологическими факторами, а расходование запаса зависит от характера бега, спортсмен уже не может в каждый момент отдавать максимум возможной мощности, чтобы не израсходовать запас энергии преждевременно и не выдохнуться на дистанции, а должен искать оптимальный для своих особенностей режим бега.
Нахождение оптимального управления в подобных динамических задачах требует решения в процессе управления достаточно сложной математической задачи методами вариационного исчисления или математического программирования в зависимости от вида математического описания (математической модели) системы. Таким образом, органической составной частью системы оптимального управления становится счетно-решающее устройство или вычислительная машина. Принцип поясняется на рис. 1.10. На вход вычислительного устройства (машины) ВМ поступает информация о текущих значениях координат х с выхода объекта О, об управлениях и с его входа, о внешних воздействиях z на объект, а также задание извне различных условий: значение критерия оптимальности граничных условий информация о допустимых значениях Вычислительное
Как работать